

УөУРЛ«ұЫөД»ъЖчИЛИзәОИҘНкіЙПсҙтҝӘЖҝёЗХвСщөДИООсДШЈҝ°ҙАнЛөЈ¬УҰёГУлИЛАа¶ҜЧчБчіМІоІ»¶аЈәЛьРиТӘПИУГТ»Ц»КЦОХЧЎЖҝЧУөДөЧІҝЈ¬И»әуУГБнТ»Ц»КЦЧҘЧЎЖҝёЗІўҪ«ЖдЕЎПВАҙЎЈХвЦЦёЯІгҙОөДІҪЦиРтБРҫНКЗОТГЗЛщКмЦӘөДДЈКҪЈ¬¶шЗТЛьІ»КЬІЩҝШ¶ФПуөДјёәОәНҝХјдЧҙМ¬У°ПмЎЈБнНвТ»ёцәГҙҰКЗЈ¬УлЦјФЪНЁ№эС§П°ІЯВФАҙҪвҫцИООсөДЗҝ»ҜС§П°јјКхІ»Н¬Ј¬ДЈКҪІ»РиТӘФЪКэРЎКұЎўКэЦЬЙхЦБКэФВөДС§П°№эіМЦРЙгИЎКэТФ°ЩНтјЖөДКҫАэҪшРРСөБ·ЎЈ
ЧоҪьЈ¬facebook AIСРҫҝФәЈЁFAIRЈ©өДТ»ёцНЕ¶УКФНјПтБҪёц»ъЖчИЛSawyerКЦұЫ№аКдҙУҝвЦРСЎФсККөұјјДЬІҪЦиТФНкіЙДҝұкөДДЬБҰЎЈФЪГҝёцКұјдІҪЦиАпЈ¬ХвБҪёц»ъЖчКЦұЫұШРлҫц¶ЁК№УГДДЦЦјјДЬТФј°К№УГДДР©ІОКэ(АэИзК©јУБҰөДО»ЦГЎўУГБҰіМ¶И»тТЖ¶ҜХвР©ДҝұкөДЧЛКЖ)ЎЈҫЎ№ЬЙжј°өҪРн¶аёҙФУөДОКМвЈ¬ө«ёГНЕ¶УұнКҫЈ¬ЛыГЗөД·Ҫ·ЁМбёЯБЛС§П°Р§ВКЈ¬К№өГ»ъЖчИЛФЪҫӯ№э¶М¶МјёёцРЎКұөДЕаСөәуҫНҝЙТФ»сөГІЩЧЭ¶ФПуөДјјДЬЎЈ
FacebookСРҫҝНЕ¶У»сөГөД№ШјьҫӯСйКЗЈ¬¶ФУЪРн¶аИООсЈ¬С§П°№эіМҝЙТФ·ЦОӘБҪёцІҝ·ЦЈә1)С§П°ИООсДЈКҪЈ»2)С§П°ОӘІ»Н¬јјДЬСЎФсККөұІОКэ»ҜөДІЯВФЎЈЛыГЗ¶ПСФЈ¬ХвЦЦ·Ҫ·Ё»бҙЩК№»ъЖчИЛ»сөГёьҝмөДС§П°Р§ВКЈ¬Іҝ·ЦФӯТтКЗАҙЧФёш¶ЁИООсөДІ»Н¬°жұҫКэҫЭҝЙТФУГУЪМбёЯ№ІПнјјДЬЎЈҙЛНвЈ¬ХвЦЦ·Ҫ·ЁФКРнФЪПа№ШИООсЦ®јдЧӘТЖС§П°ДЈКҪЎЈ
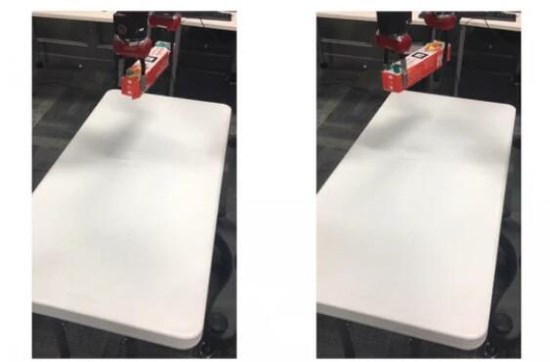
Нј2ЈәFacebook AIСРҫҝФәөД»ъЖчИЛКЦұЫ
ПкПёҪйЙЬХвПоСРҫҝөДВЫОДөДәПЦшХЯҪвКНіЖЈәЎ°ҫЩАэАҙЛөЈ¬јЩЙиОТГЗТСҫӯС§»бБЛТ»ёцәЬәГөДДЈКҪЈ¬ҝЙТФФЪДЈДв№эіМЦРК°ИЎТ»ёціӨМхЎЈФЪДЗАпОТГЗҝЙТФБЛҪвІЩЧч¶ФПуөДЧЛКЖЎўјёәОРОЧҙТФј°ёь¶аРЕПўЎЈИ»әуЈ¬ОТГЗҝЙТФФЪПа№ШИООсЦРЦШёҙК№УГёГДЈКҪЈ¬АэИзФЪПЦКөКАҪзЦРҪцҙУФӯКјНјЖ¬№ЫІмЦРК°ИЎНРЕМЈ¬јҙК№ЧҙМ¬ҝХјдәНЧојСІОКэ»Ҝ(АэИзЧҘИЎЧЛКЖ)¶јУРәЬҙуІ»Н¬ЎЈУЙУЪДЈКҪКЗ№М¶ЁөДЈ¬ТтҙЛНРЕМК°ИЎИООсөДІЯВФС§П°Ҫ«·ЗіЈУРР§Ј¬ТтОӘЛьЦ»РиТӘС§П°ГҝПојјДЬөДІОКэЎЈЎұ
СРҫҝИЛФұОӘЙПКцБҪёц»ъЖчұЫМṩБЛТ»ёцНЁУГөДјјДЬҝвЈ¬ИзЕӨЧӘЎўҫЩЖрәНЙмКЦЈ¬ЛьГЗұШРлҪ«ХвР©јјДЬУҰУГУЪјёёцЙжј°І»Н¬¶ФПуЎўјёәОРОЧҙәНіхКјЧЛКЖөДәбПтМбЙэЎўК°ИЎЎўҙтҝӘәНРэЧӘИООсЦРЎЈНЁ№эК№УГөНО¬КдИлКэҫЭЈ¬ИзјёәОәНұҫМеёРКЬМШХч(№ШҪЪО»ЦГЎў№ШҪЪЛЩ¶ИЎўД©¶ЛР§УҰЖчЧЛКЖ)ҪшРРСөБ·Ј¬ФЪMuJoCo(ДЈДв»·ҫі)ЦРС§П°ДЈКҪЈ¬И»әуФЪДЈДвәНПЦКөКАҪзЦРҪ«ЖдЧӘ»»ОӘКУҫхКдИлІЩЧчЎЈ
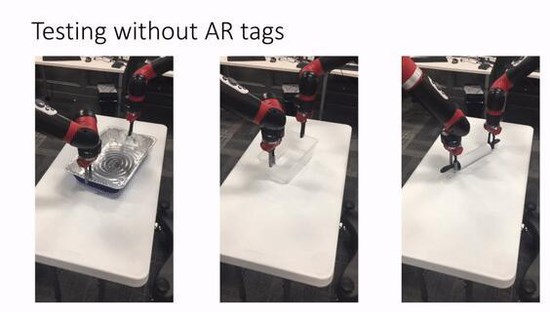
ФЪКөСй№эіМЦРЈ¬SawyerКЦұЫЕдұёБЛЙгПсН·Ј¬ІўУЙFacebookөДPyRobotҝӘФҙ»ъЖчИЛЖҪМЁҝШЦЖЈ¬ЖдИООсКЗІЩЧЭ9ёцјТНҘОпЖ·(Из№цХлЎўЧгЗтЎўІЈБ§№ЮәНTРО°вКЦ)Ј¬ХвР©ОпЖ·РиТӘБҪёцЖҪРРөДПВтҰјРЗҜІЕДЬУлЦ®Ҫ»»ҘЎЈҫЎ№ЬІ»өГІ»ҙУФӯКјөДКУҫхНјПсЦРС§П°Ј¬ө«ЛыГЗұнКҫЈ¬ЖдAIПөНіК№УГ2000ЦЦјјДЬС§П°ІЩЧчҙу¶аКэ¶ФПуЈ¬ФЪҙуФј4өҪ10ёцРЎКұөДЕаСөЦРЈ¬іЙ№ҰВКі¬№э90%ЎЈ
СРҫҝИЛФұРҙөАЈәЎ°ОТГЗТСҫӯСРҫҝБЛИзәОАыУГУлЧҙМ¬ОЮ№ШөДјјДЬРтБРАҙј«ҙуөШМбёЯОЮДЈРНЗҝ»ҜС§П°өДСщұҫР§ВКЎЈҙЛНвЈ¬ОТГЗТСҫӯФЪКөСйЦРЦӨГчЈ¬Ҫ«ФЪДЈДвЦРС§өҪөДјјДЬРтБРЧӘТЖөҪПЦКөКАҪзөДИООсЦРЈ¬К№ОТГЗДЬ№»·ЗіЈУРР§өШҪвҫцНјПсЦРөДПЎКиҪұАшОКМвЈ¬ҙУ¶шК№СөБ·ХжХэөД»ъЖчИЛЦҙРРёҙФУјјДЬіЙОӘҝЙДЬЎЈЎұ



 ҫЩұЁ
ҫЩұЁ